감시 데이터 처리 시스템(SDPS)

감시 데이터 처리 시스템(SDPS)
민간 항공기 추적 알고리즘
프로젝트 목표 DOWNLOAD CASE STUDY
항공 관제를 위해 항공 관제장치는 모든 항공기의 위치와 속도를 항상 항공 교통 상황실에 알려야 합니다. 민간 항공기 추적 알고리즘(Surveillance Data Processing System)은 다양한 레이더 관측소의 데이터에서 모든 항공기를 추적하는 임무를 하고 있습니다.
이 프로젝트의 목표는 가용한 모든 데이터와 정보로부터 아주 정확하고 신뢰할 수 있는 항공기 상황도를 계산하는 SDPS용 알고리즘을 개발하는 것이었습니다. 개발된 알고리즘은 매우 높은 품질 요구 사항을 가진 기존의 SDPS에 하나의 소프트웨어 모듈로 구현되고 통합되었습니다.
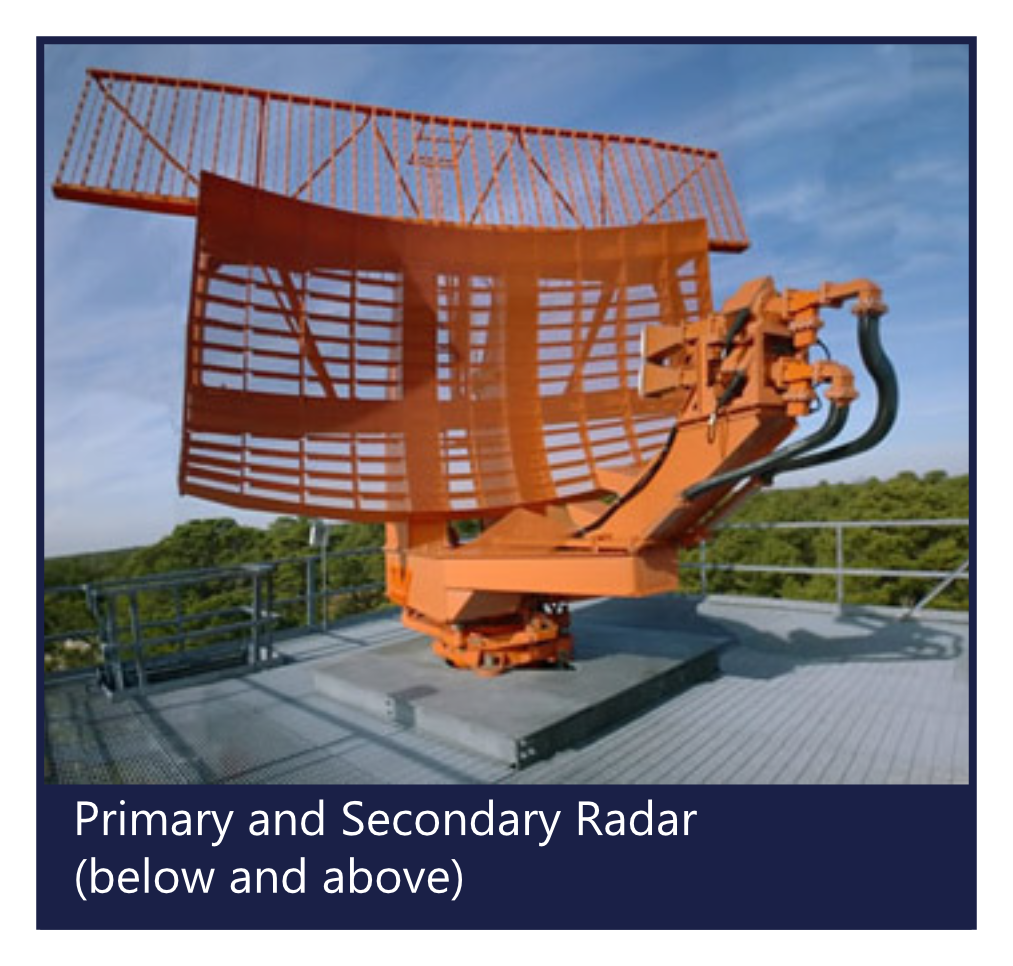
데이터 처리 측면에서 SDPS의 가장 큰 문제점은 다양한 레이더 기술을 사용한다는 점입니다. 예를 들어 1차 레이더, Mark X 및 Mark XII 표준에 따른 2차 레이더, 에이디에스-비(Automatic Dependent Surveillance– Broadcast, ADS-B), 광역 다측량 레이더(Wide Area Multilateration, WAM) 등이 있습니다. 센서 기술마다 측정 모델, 노이즈 분포, 오류 패턴, 측정 속도가 다릅니다.
서로 다른 레이더로부터 얻어지는 데이터가 SDPS에서 실시간으로 처리되어야 하며 정확한 항공 상황도를 생성하기 위해 하나로 합쳐져야 합니다. 소프트웨어 모듈의 알고리즘을 개발하고 구현할 때 항공기의 경로가 매우 정확하고 안정적으로 계산되어야 합니다.